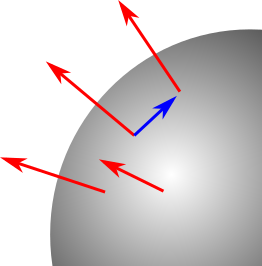
Suppose you have a spherically symmetric vector field, as in the diagram. Can we find an affine connection which transports the vectors into one-another? That is, a geometry in which they are all “parallel”?
Take Schwarzschild spacetime, in the usual coordinates  . The coordinate basis vectors are
. The coordinate basis vectors are  ,
,  ,
,  , and
, and  . I will write these as
. I will write these as  , so for
, so for  for example, this is the vector
for example, this is the vector  with components
with components  . Recall a connection
. Recall a connection  is defined by:
is defined by:
![\[\nabla_{\mathbf e_\mu}\mathbf e_\nu = \Gamma^\alpha_{\mu\nu}\mathbf e_\alpha,\]](http://cmaclaurin.com/cosmos/wp-content/ql-cache/quicklatex.com-27bb80f2a8f6f020a6a99a6a793f678f_l3.png "Rendered by QuickLaTeX.com")
where the  are the connection coefficients, also called Christoffel symbols in the specific case of the Levi-Civita connection. (Recall the Levi-Civita connection is the one inherited from the metric: it is the unique symmetric and metric-compatible connection.) For each pair
are the connection coefficients, also called Christoffel symbols in the specific case of the Levi-Civita connection. (Recall the Levi-Civita connection is the one inherited from the metric: it is the unique symmetric and metric-compatible connection.) For each pair  , this definition is interpreted as the derivative of the
, this definition is interpreted as the derivative of the  field, in the direction .
field, in the direction .
Now consider an arbitrary vector field of the form:
![\[u^\mu = (A(t,r),B(t,r),0,0).\]](http://cmaclaurin.com/cosmos/wp-content/ql-cache/quicklatex.com-4d63f7a77a5c142d312b322bb6c5acf2_l3.png "Rendered by QuickLaTeX.com")
We would not expect the sought-for parallel transport to work for vectors with components in the  or
or  -directions — at least, not without imposing extra choices. In particular, the “hairy ball theorem” states no smooth, non-vanishing vector field along the 2-sphere exists: that is, within its 2-dimensional tangent bundle. For Schwarzschild spacetime, we move around a 2-sphere of constant
-directions — at least, not without imposing extra choices. In particular, the “hairy ball theorem” states no smooth, non-vanishing vector field along the 2-sphere exists: that is, within its 2-dimensional tangent bundle. For Schwarzschild spacetime, we move around a 2-sphere of constant  and
and  , by taking “directional derivatives” along the
, by taking “directional derivatives” along the  -plane. As expected,
-plane. As expected,  does not vanish, even in these directions:
does not vanish, even in these directions:
![\[\nabla_{C\partial_\theta + D\partial_\phi}\mathbf u = \Big(0,0,\frac{C B(t,r)}{r},\frac{D B(t,r)}{r}\Big).\]](http://cmaclaurin.com/cosmos/wp-content/ql-cache/quicklatex.com-4cde795af5f57b10bf8e03c23dbef917_l3.png "Rendered by QuickLaTeX.com")
The offending Christoffel symbols turn out to be  and
and  . These arise from
. These arise from  and
and  . These quantify how the radial coordinate vector changes as you move around on a sphere.
. These quantify how the radial coordinate vector changes as you move around on a sphere.
One option is to simply define new connection coefficients for which these vanish:  and
and  , and keep the remaining Christoffel symbols, in order to remain as close as possible to the metric connection. This procedure is justified, because given a frame field, any choice of smooth functions
, and keep the remaining Christoffel symbols, in order to remain as close as possible to the metric connection. This procedure is justified, because given a frame field, any choice of smooth functions  yields a valid connection (Lee 2018
yields a valid connection (Lee 2018  , Introduction to Riemannian manifolds, Lemma 4.10). We can also write this new connection as the usual (Levi-Civita) covariant derivative plus a bilinear correction:
, Introduction to Riemannian manifolds, Lemma 4.10). We can also write this new connection as the usual (Levi-Civita) covariant derivative plus a bilinear correction:
![\[\tilde\nabla_{\mathbf v}\mathbf u := \nabla_{\mathbf v}\mathbf u - \frac{1}{r} \big(\partial_\theta\otimes d\theta\otimes dr + \partial_\phi\otimes d\phi\otimes dr)(\mathbf v,\mathbf u).\]](http://cmaclaurin.com/cosmos/wp-content/ql-cache/quicklatex.com-0cb08921b118007ab2fa6f731a6a4fc0_l3.png "Rendered by QuickLaTeX.com")
The parenthetical term is a (1,2)-tensor we interpret as accepting the vectors in the last two slots ( in the second slot, and
in the second slot, and  into the last), returning another vector. The correction term may also be written
into the last), returning another vector. The correction term may also be written  , where the angle brackets mean contraction of a 1-form and vector in this case. Intuitively, the parenthetical term just above is also a projection, returning only the angular part of the differentiation direction . This is the blue arrow in the original diagram. For large , the basis vectors and grow very large, but the red vectors must adjust only by the angle rotated through, hence the
, where the angle brackets mean contraction of a 1-form and vector in this case. Intuitively, the parenthetical term just above is also a projection, returning only the angular part of the differentiation direction . This is the blue arrow in the original diagram. For large , the basis vectors and grow very large, but the red vectors must adjust only by the angle rotated through, hence the  multiplier.
multiplier.  returns the radial component
returns the radial component  .
.
As a check,  as required. The new connection is not symmetric, because
as required. The new connection is not symmetric, because  and
and  remain non-vanishing. Hence the connection has “torsion”. I won’t write out its Riemann and Ricci tensors, but the scalar curvature is
remain non-vanishing. Hence the connection has “torsion”. I won’t write out its Riemann and Ricci tensors, but the scalar curvature is  ! At face value this violates the Einstein field equations, for which the Ricci tensor (and hence the scalar curvature) always vanish in a vacuum, however Einstein’s equations use the Levi-Civita connection. Curiously, the value is precisely the scalar curvature for a 2-sphere.
! At face value this violates the Einstein field equations, for which the Ricci tensor (and hence the scalar curvature) always vanish in a vacuum, however Einstein’s equations use the Levi-Civita connection. Curiously, the value is precisely the scalar curvature for a 2-sphere.
We can also construct a symmetric connection  for which additionally
for which additionally  . In the (somewhat) index-free expression:
. In the (somewhat) index-free expression:
![\[\bar\nabla_{\mathbf v}\mathbf u := \nabla_{\mathbf v}\mathbf u - \frac{2}{r} \big(\partial_\theta\otimes dr\,d\theta + \partial_\phi\otimes dr\,d\phi)(\mathbf v,\mathbf u),\]](http://cmaclaurin.com/cosmos/wp-content/ql-cache/quicklatex.com-b06eb486ce32cbf4d6dda1a77e2d4a97_l3.png "Rendered by QuickLaTeX.com")
where  is the symmetric product, and analogously for
is the symmetric product, and analogously for  . This connection has Ricci tensor equal to the metric in the and components, apart from a scalar factor
. This connection has Ricci tensor equal to the metric in the and components, apart from a scalar factor  , and vanishing elsewhere. Its scalar curvature is
, and vanishing elsewhere. Its scalar curvature is  .
.
Hence we have constructed connections which parallel transport our spherically symmetric vector field around a sphere, and deviate as little as possible from the Levi-Civita connection. Neither of the new connections are “metric-compatible”, for instance  . Hence
. Hence  . The same holds for .
. The same holds for .
If you find some formulae here do not work for you, compare your convention for the connection coefficient index order, or try swapping and in the correction terms. I had problems myself, so undertook a painstaking review of my own conventions, and wrote a new page describing them. Finally, beware of coordinate basis vectors! The “vectors” and actually depend on all four coordinates, which is related to the so-called “second fundamental confusion of calculus”! In case of ambiguity, perhaps some should be replaced with  and
and  , or scalar multiples thereof. I avoided this technicality in the interests of readability. This concern only applies to coordinate systems in which the metric is non-diagonal.
, or scalar multiples thereof. I avoided this technicality in the interests of readability. This concern only applies to coordinate systems in which the metric is non-diagonal.