Last time we discussed the “spatial gradient” or “3-gradient”, and here we follow up with two examples. Recall from before that a scalar field  has gradient
has gradient  , and the part of this which is orthogonal to an observer 4-velocity
, and the part of this which is orthogonal to an observer 4-velocity  is, as a vector:
is, as a vector:
![\[^{(3)}(d\Phi)^\sharp := (d\Phi)^\sharp + \langle d\Phi,\mathbf u\rangle \mathbf u.\]](http://cmaclaurin.com/cosmos/wp-content/ql-cache/quicklatex.com-9b0d26cd365bb242a44e935479e7df64_l3.png "Rendered by QuickLaTeX.com")
This direction has the greatest increase of , for any vector in ’s 3-space (that is, orthogonal to ), per length of the vector.
As an example, suppose the 4-gradient vector  is a null, future-pointing vector. It can be decomposed
is a null, future-pointing vector. It can be decomposed  , where
, where  , and
, and  is a unit spatial vector orthogonal to . Physically, this gradient may be interpreted as a null wave or photon, which the observer determines to have energy (or related quantity, such as frequency)
is a unit spatial vector orthogonal to . Physically, this gradient may be interpreted as a null wave or photon, which the observer determines to have energy (or related quantity, such as frequency)  , and to move in the spatial direction . The 3-gradient vector is
, and to move in the spatial direction . The 3-gradient vector is  , hence the direction of relative velocity also has the steepest increase of , within the observer’s 3-space.
, hence the direction of relative velocity also has the steepest increase of , within the observer’s 3-space.
Suppose now is a unit, timelike, future-pointing vector, so that we may interpret it as the 4-velocity  of a second observer. Then
of a second observer. Then  , where
, where  is the Lorentz factor between the pair. But we also have the “relative velocity” decomposition
is the Lorentz factor between the pair. But we also have the “relative velocity” decomposition  , where
, where  is the relative velocity of as determined in ’s frame, as I discussed previously. Combining these,
is the relative velocity of as determined in ’s frame, as I discussed previously. Combining these,  . Hence within the observer’s 3-space, again increases most sharply in the direction of the relative velocity.
. Hence within the observer’s 3-space, again increases most sharply in the direction of the relative velocity.
 ‘s perspective. The timelike 1-form
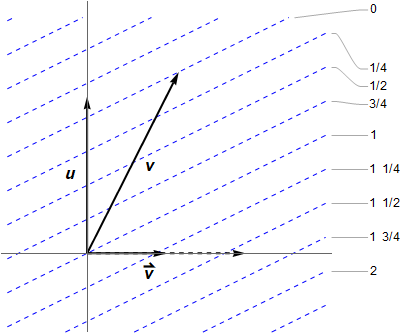
‘s perspective. The timelike 1-form  is suggested by dotted blue lines, given at intervals of 1/4 for more resolution. These are orthogonal to the vector , in the Lorentzian sense.
is suggested by dotted blue lines, given at intervals of 1/4 for more resolution. These are orthogonal to the vector , in the Lorentzian sense.The figure shows the single tangent space — think of this as the linearisation of what is happening locally over the manifold itself. The hyperplanes are numbered by , where only the differences between them are relevant, as an overall constant was not specified. Observe crosses four of them, spanning an interval  , so is the negative of ’s proper time; see a previous post for more background. In both our examples, the scalar decreases towards the future (or can vanish in the null case), even though the gradient vectors are future-pointing. That is, the gradient vectors actually point “down” the slope! This quirk is due to our −+++ metric signature, and would apply to spacelike gradients if +−−− were used instead. This really hurt my brain, until I drew the diagram. 🙁
, so is the negative of ’s proper time; see a previous post for more background. In both our examples, the scalar decreases towards the future (or can vanish in the null case), even though the gradient vectors are future-pointing. That is, the gradient vectors actually point “down” the slope! This quirk is due to our −+++ metric signature, and would apply to spacelike gradients if +−−− were used instead. This really hurt my brain, until I drew the diagram. 🙁
To construct it, consider the action of on the axes. The horizontal axis is the relative velocity direction, with unit vector  . One can show
. One can show  . Also
. Also  , but I find it easier to think of:
, but I find it easier to think of:  . These give the number of hyperplanes crossed by the unit axes vectors, then you can literally “connect the dots” since the 1-form is linear. In the figure
. These give the number of hyperplanes crossed by the unit axes vectors, then you can literally “connect the dots” since the 1-form is linear. In the figure  , so
, so  . (As for the 3-gradient, it vanishes in the direction, hence must cross no contours of
. (As for the 3-gradient, it vanishes in the direction, hence must cross no contours of  . It would be drawn as vertical lines, with corresponding vector pointing to the right.)
. It would be drawn as vertical lines, with corresponding vector pointing to the right.)
Most of our discussion applies to arbitrary 1-forms, not just gradients which are termed exact 1-forms. I derived the work here independently, but the literature contains some similar material. It turns out Jantzen, Carini & Bini 1992 ") §2 explicitly define the “spatial gradient”, as they most appropriately call it. A few textbooks discuss scalar waves, for which the 3-gradient vector is the wave 3-vector, which is orthogonal to the wavefronts within a given frame, as discussed shortly.
§2 explicitly define the “spatial gradient”, as they most appropriately call it. A few textbooks discuss scalar waves, for which the 3-gradient vector is the wave 3-vector, which is orthogonal to the wavefronts within a given frame, as discussed shortly.